

软体机器人创意设计,不可思议的软体机器人
机器人对于我们来说,本身就是黑科技,高大上的产品,我们的未来将会是它们的主场,现今已经开始展现峥嵘。话说未来什么样的设计最热门火热,机器人设计无疑会占据着重要的席位。下面优概念工业设计为大家带来一组不可思议的机器人设计,它的最大亮点就在于软体设计,一起来看看软体机器人创意设计。
可被磁场控制的软体机器人设计,人机交流更加安全
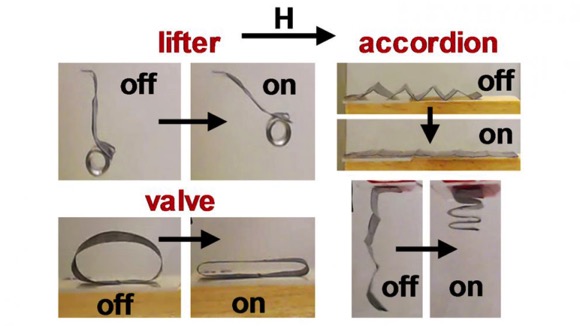
北卡罗莱纳州立大学的科学家们正在研究如何利用磁场来控制仿生机器人的移动,原理不难理解,就是在聚合物中嵌入磁铁链,当启动一个磁场的时候,会形成一股扭转力,然后这股扭转力会让磁铁链和磁场的方向保持一致。所以,如果这个聚合物可以弯曲,在磁铁链和磁场产生的扭转力的作用下,它就可以向任何方向弯曲。与更传统的软体机器人相比较而言,这使软体机器人不再需要被电源和气泵束缚,更加的便宜,更加柔软,人机交流更加安全。
物美价廉的软体机器人手臂设计,灵感来源于纸质的立体模型
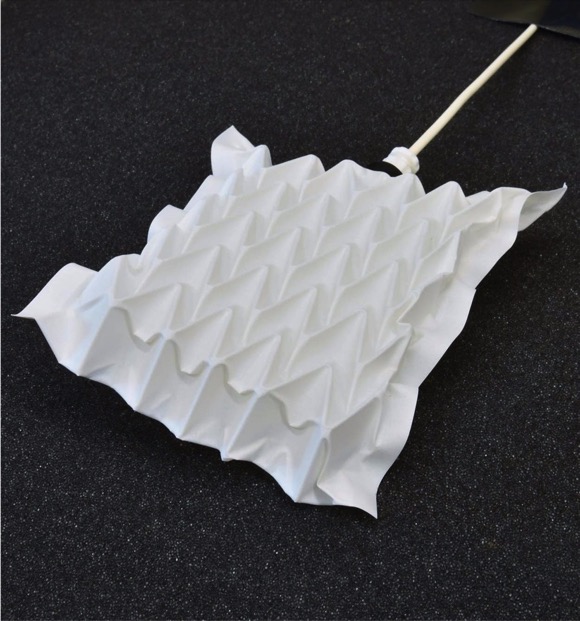
麻省理工学院计算机科学与人工智能实验室和哈佛大学Wyss研究所的研究人员开发了一种新型的软体机器人肌肉,其灵感来源于纸质的立体模型。 它实质上是一个充满空气的袋子,里面是一个起着骨骼作用的立体结构。通过抽气效应,研究人员可以使其肌肉举起是自身1000倍的重量。 相比之下,一个像超人气UR10一样更加传统的机器人手臂,重达64磅,只能举起其三分之一的重量。这种系统的美妙之处在于它夸张多样的灵活性。就像你可以结合不同的肌肉一样,你可以使用不同的材料作为皮肤。


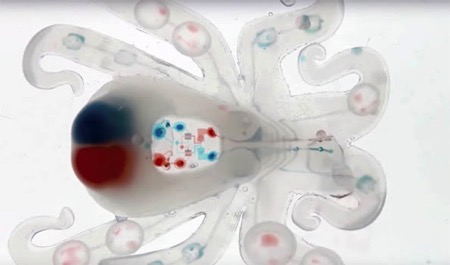
Octobot世界首台软体章鱼机器人设计,应用前景广泛

Octobot是一只完全软体的章鱼机器人,由哈佛大学研发,全身所有的部分都是通过3D打印技术完成,摸上去有点黏糊糊的。这种软体机器人具有变形、缓冲特点,可以穿过狭小、不规则的空间,这在医疗、军事以及探测领域都能派上用场。而Octobot是真正的完全柔软,它不需要刚性材料,能量来源过氧化氢分解,前景大大的!

新型软体机器人设计,极端条件下也可工作

哈佛大学的研究人员研制出了一种酷似章鱼的软体机器人。这种机器人的脊柱和四肢中嵌入了橡胶高聚物制成的空心“膛腔”。“膛腔”可以膨胀收缩,从而使机器人变形并“运动”。这款软体机器人长18厘米,可以单“腿”离地,能在一分钟内匍匐穿过2厘米高的间隙。它重心低、稳定性高,可以代替人手完成许多精细的工作(如协助手术等)。研究人员正在着手改善其前进速度,以便创造出更完善的能够在间隙等极端条件下工作的软体机器人。


ugainian官方微信
扫一扫,订阅最新资讯












留言
评论(共0条评论)