R1是一种移动制图系统,旨在为自动驾驶汽车创建混合高清(HD)地图。基于NAVER专有制图解决方案的混合高清地图,是通过有机整合从现有精密航空照片中检索到的信息以及R1车辆收集的点云信息而创建的高清地图。








2D和3D数据均使用独特的算法处理,该算法会自动提取绘制HD地图所需的特征。与传统的MMS设备相比,可降低生产成本,同时确保了相同水平的准确性和新近度。
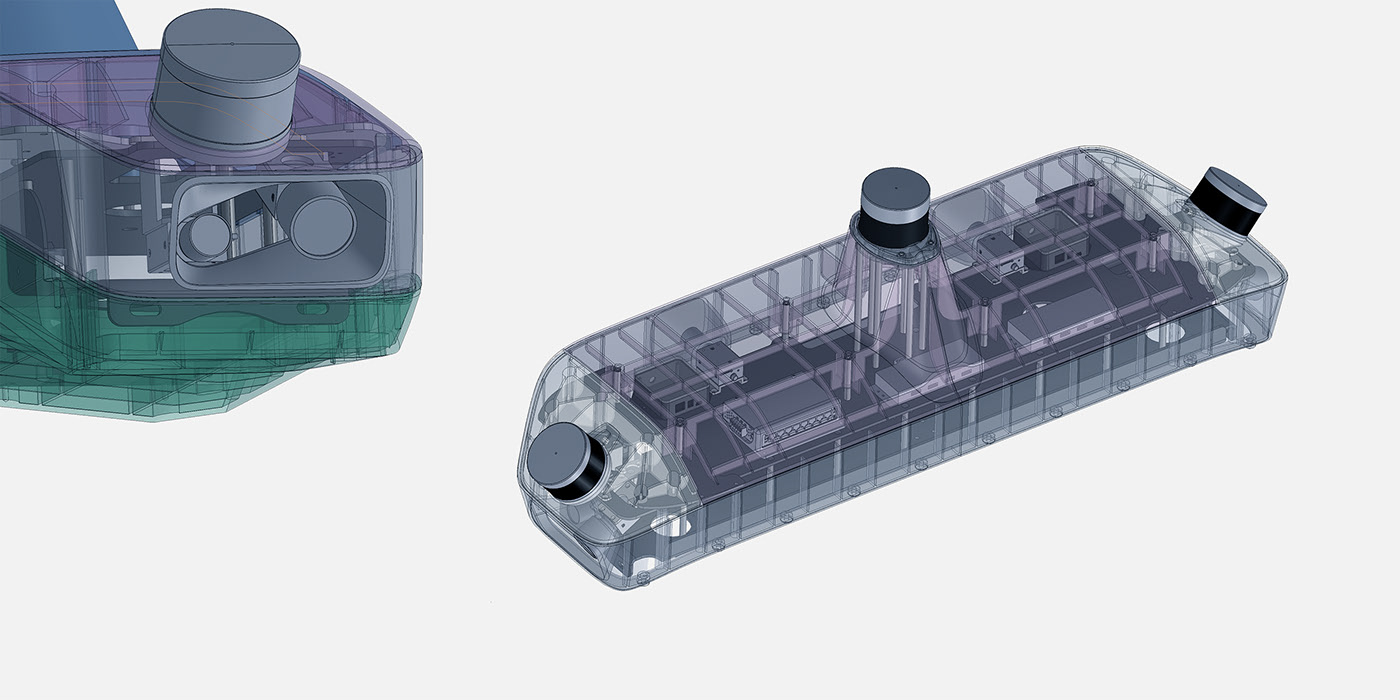
R1配备32通道激光雷达,四个16通道激光雷达,1通道激光雷达,8个摄像头和2个天线。这些表面的设计旨在最大程度地提高LiDAR和摄像机的视野,同时保持圆滑的设计。
设计 : KIM SEUNGWOO














评论
评论(共0条评论)