

分析智能电子产品设计中的智能垃圾桶产品设计原理
随着科技的不断创新,人们使用的简单日常工具越来越多的变成电子智能化,而且更加富有人性化功能,人们的生活也变得越来越智能化。在提倡效率至上,主张尽可能降低劳动产生时间的当下,人们越来越依赖科技进步带来的便利,在日新月异的今天,科技已经让人们的生活变得非常便捷,一个简单的垃圾桶就能够体现出智能电子产品设计领域的进步,下面就一起来了解一下智能产品的设计原理和研究吧!
一、垃圾桶功能分析
本文介绍的智能垃圾桶主要有三个功能:自动识别人手、朝人手方向移动、停留在人手前20CM处3秒、原路返回以及简洁大气的外形结构设计。
(一)自动识别人手功能。通过超声波传感器发出超声波信号,当感应到人手时,启动小车朝人手的方向移动。直到移动到人手位置前20CM停下。
(二)停留3秒。当垃圾桶移动到人手前20CM处时,系统向小车发出停止3秒的指令,这样用户有时间把垃圾放入垃圾桶中。
(三)自动返回。小车记忆储存原先的线路,当停留3秒之后,便沿着原来的线路返回到墙角的位置。
(四)智能垃圾桶的外观设计。基于垃圾桶的使用环境是室内以及垃圾桶的核心功能投放垃圾和存放垃圾。考虑到生产制作的便利,把垃圾桶桶身设计成简洁的圆柱形,桶身上配备一个压环,可以用于垃圾袋的固定。垃圾桶桶身下方是传感器和电源按钮,51单片机小车被安放在垃圾桶的底部,通过51单片机小车的电机的向前向后运转来带动垃圾桶移动。
二、电路系统分析
本文采用单片机STC89S52RC作为智能小车的控制的系统核心,由压电超声波传感器、电源电路、驱动模块等构成了一个基本的智能小车控制系统。STC89S52RC单片机中的计数器和外部中断信号调用子程序测量出垃圾桶离人手的距离,进而控制小车的前进、停止和后退,实现垃圾桶的智能朝人移动和返回。当垃圾桶移动到人手距离小于20CM 时,系统便控制直流电机停止3秒,3秒后控制电动反向,于是垃圾桶便原路返回到起始位置。
(一)主控电路设计
本文采用的是以STC89C52RC单片机为基础的51智能小车平台来实现垃圾桶的识别人手、前进、停止、后退等动作。STC89C52RC单片机是一种低成本、低功耗、高性能的微控制器,广泛应用于嵌入式控制系统[4]。该智能小车是一个集传感探测技术、智能控制技术和电机拖动技术为一体的机器人[5]。S T C 8 9 C 5 2 R C 单片机工作电压在5.5V~3.3V/3.8V~2.0V,工作频率范围0~40MHz,相当于普通8051的0~80MHz,实际工作频率可达48MHz。该单片机最小系统模块支持40 脚DIP封装的51单片机实验,集成优质芯片锁紧座,可以用来批量烧写程序,并且单片机所有I/O口全部用排针引出,方便实验拓展。 该单片机的最小系统也是单片机能够正常运行并完成各种性能要求的最小电路。51智能小车采用2节3.7V可充电锂电池为其供电,电源方案为LM7805稳压IC。
(二)电机驱动电路
小车的电机为1:48强磁抗干扰减速电机,电机的驱动方案是H桥L293D驱动芯片。L293D是专用的驱动集成电路,其输出电流为2A,最高电流为4A,最高工作电压50V。当驱动直流电机时,可以直接控制两路电机,每个电动的运动要靠两个引脚控制。因为本文用到的小车只有两个电机,所以要通过调制前面两个轮子转速成正反转来达到控制小车向前移动到人手位置和向后移动到起始位置的目的。要实现电机的正反转,只需要改变输入端的电平正负就可以了。
通过PWM对直流电机进行调整,只要设置IN1和IN2,然后确定电机的转动方向,最后对使能端输出PWN脉冲,就可以实现调速。当信号是0的时候,电机是停止的状态;信号是1的时候,并且IN1和IN2是00或11时,电机是制动的状态,电机是不会转运的。在本系统中由单片机I\0 管脚的输出电平信号组合来设定L293D控制端的高低电平,这样就可以控制电机的动作了[6]。
(三)超声波模块
超声波是频率比声波高的一种机械振荡波,其频率在20ZHZ以上[7]。超声波模块使用的是HC-SR04超声波模块,可提供2cm~400cm的非接触式距离感测功能,测距精度可高达3nm,模块包括超声波发射器、接收器和控制电路。基本的工作原理是:采用IO口TRIG触发测距,给最少10us的高电平信呈,模块自动发送8个40khz的方波,自动检测是否有信号返回,有信号返回时通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。垃圾桶离人手距离=(高电平时间×声速(340M/S))/2。
三、设计实践
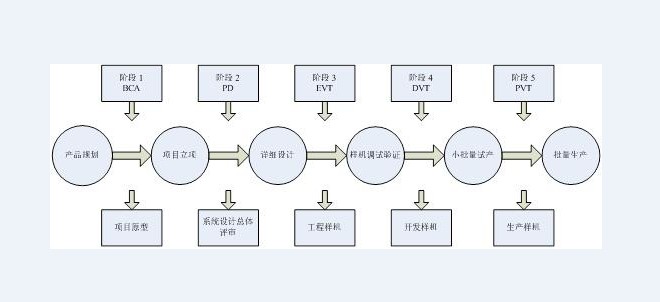
智能垃圾桶的制作流程:模块接线;烧录程序;制作垃圾桶模型; 硬件安装[8]。
通过对智能垃圾桶实现的功能进行分析,本文将智能垃圾桶设计成从上到下三个部分。分别是垃圾袋固定环,用于固定垃圾袋如图8; 垃圾桶身,是一个半透明的圆柱形的塑料体,采用半透明材质是因为半透明材质绚丽可爱[9],作为垃圾桶身方便用户透过桶身就可以看到垃圾桶有多少垃圾有什么垃圾,比较方便;智能小车部分,通过超声波传感器和STC89C52RC单片机的配合使用,识别人的手势,进而驱动垃圾桶向人方向移动。
当本系统将各模块连接好后,上电初始化系统。小车通过超声波传感器一直处于探测人手和计算离人手距离的状态中。当小车探测到人手的信号传递给单片机,单片机控制电动运动使小车朝人手方向移动,直到计算小车离人手的距离小于20CM时,控制电动停止运转3秒。3秒后电动反向运转直到小车回到起始位置。
四、实际测试和结论
对完成原型设计的该智能垃圾桶进行了测验。当开启电源后,把超声波传感器对准人的方向。人手拿着垃圾进入传感器识别范围后, 电动启动。垃圾桶朝人手的方向移动,直到人手前20cm处停下。人将垃圾丢到垃圾桶后,垃圾桶执行程序命令,原路返回,回到起始位置。通过测验显示,设计的智能垃圾桶的电路原理正确,实际了原定的功能,技术功能可靠。
不同的智能产品有着不同的设计方法,而且这样的产品出现会让人感觉到生活的便捷和温馨。

ugainian官方微信
扫一扫,订阅最新资讯












留言
评论(共0条评论)